МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И
СЕРТИФИКАЦИИ
(МГС)
INTERSTATE COUNCIL FOR STANDARDIZATION,
METROLOGY AND CERTIFICATION
(ISC)
|
МЕЖГОСУДАРСТВЕННЫЙ |
ГОСТ
ИСО |
Вибрация
ТРЕБОВАНИЯ
К КАЧЕСТВУ БАЛАНСИРОВКИ
ЖЕСТКИХ РОТОРОВ
ISO 1940-1:2003
Mechanical vibration - Balance quality requirements
for rotors in a constant (rigid) state -
Part 1: Specification and verification of balance tolerances
(IDT)
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены»
1 ПОДГОТОВЛЕН Открытым акционерным обществом «Научно-исследовательский центр контроля и диагностики технических систем» на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 183 «Вибрация и удар»
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол № 32 от 24 октября 2007 г.)
За принятие проголосовали:
|
Краткое наименование страны по МК (ИСО 3166) 004-97 |
Код страны по МК (ИСО 3166) 004-97 |
Сокращенное наименование национального органа по стандартизации |
|
Азербайджан |
AZ |
Азстандарт |
|
Армения |
AM |
Минторгэкономразвития |
|
Беларусь |
BY |
Госстандарт Республики Беларусь |
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Федеральное агентство по техническому регулированию и метрологии |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госпотребстандарт Украины |
4 Настоящий стандарт идентичен международному стандарту ИСО 1940-1:2003 «Вибрация. Требования к качеству балансировки жестких роторов. Часть 1. Определение допустимого дисбаланса» (ISO 1940-1:2003 «Mechanical vibration - Balance quality requirements for rotors in a constant (rigid) state - Part 1: Specification and verification of balance tolerances»).
Сведения о соответствии международных стандартов, на которые даны ссылки, межгосударственным стандартам, принятым в качестве идентичных и модифицированных межгосударственных стандартов, приведены в дополнительном приложении F.
Международный стандарт разработан ИСО/ТК 108 «Вибрация и удар». Перевод с английского языка (en). Официальные экземпляры международных стандартов, на основе которых подготовлен настоящий межгосударственный стандарт и на которые даны ссылки, имеются в Федеральном информационном фонде технических регламентов и стандартов.
Степень соответствия - идентичная (IDТ)
5 Приказом Федерального агентства по техническому регулированию и метрологии от 25 января 2008 г. № 6-ст межгосударственный стандарт ГОСТ ИСО 1940-1-2007 введен в действие в качестве национального стандарта Российской Федерации с 1 июля 2008 г.
ВЗАМЕН ГОСТ 22061-76
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе «Национальные стандарты»
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст изменений - в информационных указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»
Содержание
Введение
Современное балансировочное оборудование позволяет весьма значительно снизить дисбаланс ротора, однако с экономической точки зрения чрезмерное завышение требований к качеству балансировки невыгодно. Поэтому решение вопроса: до какой степени целесообразно снизить дисбаланс ротора, - должно быть найдено исходя из компромисса между техническими и экономическими требованиями.
Другой важной проблемой является подтверждение полученных значений остаточных дисбалансов с учетом погрешностей его оценки. В настоящем стандарте рассмотрены новые подходы к учету погрешностей оценки дисбаланса, согласованные с ИСО 1940-2.
ГОСТ ИСО 1940-1-2007
Вибрация
ТРЕБОВАНИЯ К КАЧЕСТВУ БАЛАНСИРОВКИ ЖЕСТКИХ РОТОРОВ
Vibration. Balance quality requirements
for rotors in a constant (rigid) state.
Part 1. Specification and verification of balance tolerances
Дата введения - 2008-07-01
Настоящий стандарт устанавливает требования к жестким роторам и методы:
- определения допустимого дисбаланса;
- определения необходимого числа плоскостей коррекции;
- подтверждения полученных значений остаточного дисбаланса ротора.
Приведены рекомендации, относящиеся к классам точности балансировки жестких роторов для машин разных видов и разных частот вращения.
Настоящий стандарт может быть использован в договорных отношениях между изготовителями и заказчиками в части определения приемочных критериев при оценке остаточного дисбаланса.
Методы подтверждения приемлемости качества балансировки с учетом погрешностей, связанных с процедурой балансировки, рассмотрены в ИСО 1940-2.
Настоящий стандарт не распространяется на гибкие роторы. Требования к качеству балансировки гибких роторов установлены в ИСО 11342.
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ИСО 1000:1992 Единицы измерений СИ и рекомендации по применению кратных или дольных единиц, а также некоторых других единиц измерений
ИСО 1925:2001 Вибрация. Балансировка. Термины и определения
ИСО 1940-2:1997 Вибрация. Требования к качеству балансировки жестких роторов. Часть 2. Погрешности определения дисбаланса
ИСО 2953:1999 Вибрация. Станки балансировочные. Характеристики и методы их проверки
ИСО 8821:1989 Вибрация. Балансировка. Соглашение об учете влияния шпонки при балансировке валов и насаживаемых деталей
ИСО 11342:1998 Вибрация. Методы и критерии балансировки гибких роторов
В настоящем стандарте применены термины по ИСО 1925. Некоторые из этих терминов с соответствующими определениями приведены в настоящем разделе для удобства пользования.
3.1 балансировка: Процедура, состоящая из оценки распределения масс ротора и, при необходимости, их перераспределения таким образом, чтобы значения остаточного дисбаланса, вибрации или сил, воздействующих на опору на частоте вращения ротора, не выходили за пределы установленных допустимых значений.
3.2 неуравновешенность ротора: Состояние ротора, при котором результатом действия центробежных сил является силовое или кинематическое воздействие на его опоры.
3.3 начальный дисбаланс: Дисбаланс любого вида, имеющий место до проведения балансировки ротора.
3.4 остаточный дисбаланс: Дисбаланс любого вида, остающийся после балансировки ротора.
3.5 главный вектор
дисбалансов ![]() Векторная сумма
всех дисбалансов, распределенных вдоль оси ротора.
Векторная сумма
всех дисбалансов, распределенных вдоль оси ротора.
Примечания
1 См. примечание 1 к 3.6.
2 Данная величина может быть представлена в виде
![]()
где ![]() - векторы локальных дисбалансов
ротора, k = 1,
..., К.
- векторы локальных дисбалансов
ротора, k = 1,
..., К.
3.6 главный момент
дисбалансов ![]() Векторная сумма всех моментов дисбалансов, распределенных
вдоль оси ротора, относительно плоскости главного вектора дисбалансов 1).
Векторная сумма всех моментов дисбалансов, распределенных
вдоль оси ротора, относительно плоскости главного вектора дисбалансов 1).
___________
1) Данное определение отличается от приведенного в ИСО 1925.
Примечания
1 Главный вектор дисбалансов вместе с главным моментом дисбалансов полностью характеризуют неуравновешенность жесткого ротора.
2 Главный вектор дисбалансов не привязан к какой-либо радиальной плоскости ротора, но значение и угол главного момента дисбалансов зависят от той точки вдоль оси ротора, к которой отнесен главный вектор дисбалансов.
3 Главный момент дисбалансов часто выражают в виде пары кососимметричных векторов дисбалансов - равных по значению, но противоположных по углу - в двух произвольных радиальных плоскостях ротора.
4 Данная величина может быть представлена в виде
![]()
где ![]() - векторы локальных
дисбалансов ротора;
- векторы локальных
дисбалансов ротора;
![]() - вектор
расстояния от плоскости главного вектора дисбалансов ротора до начала
координат;
- вектор
расстояния от плоскости главного вектора дисбалансов ротора до начала
координат;
![]() - вектор
расстояния от плоскости локального дисбаланса
- вектор
расстояния от плоскости локального дисбаланса ![]() до начала координат.
до начала координат.
3.7 пара кососимметричных дисбалансов ротора: Пара равных по значению, но противоположенных по углу дисбалансов в двух заданных плоскостях ротора на некотором расстоянии друг от друга, заменяющих главный момент дисбалансов.
3.8 динамическая неуравновешенность: Состояние ротора, при котором центральная ось вращения занимает произвольное положение относительно оси вала.
Примечания
1 В отдельных случаях центральная ось вращения может быть параллельна оси вала ротора или пересекать ее.
2 Количественной мерой динамической неуравновешенности может служить пара кососимметричных векторов дисбалансов в двух заданных плоскостях (перпендикулярных к оси вала ротора).
3.9 значение дисбаланса: Произведение неуравновешенной массы на расстояние от ее центра масс до оси вращения.
Примечание - Выражают в грамм-миллиметрах (г·мм).
3.10 угол дисбаланса: Угол, под которым видна неуравновешенная масса, в полярной системе координат в плоскости, перпендикулярной коси вала ротора.
3.11 дисбаланс: Вектор, модуль которого равен значению дисбаланса, а фазовый угол - углу дисбаланса.
3.12 тип ротора: Свойство ротора, определяемое по характеру изменения состояния уравновешенности с изменением частоты вращения, по видам дисбаланса, подлежащим коррекции, и по способности сохранять или изменять положение своих частей и их центров масс друг относительно друга в пределах диапазона частот вращения.
Примечания
1 Обычно состояние уравновешенности с изменением частоты вращения изменяется незначительно. В противоположность определению, данному в ИСО 1925, даже модальный дисбаланс с изменением частоты вращения остается постоянным. Только в особых случаях изменение частоты вращения сопровождается существенным изменением дисбаланса.
2 Для описания распределения массы ротора и возможного изменения этого распределения при изменении частоты вращения полезно рассматривать ротор как совокупность масс. Эти массы могут представлять собой части ротора или быть определены в результате его разбиения на конечные элементы.
3 На тип ротора влияют его конструкция, изготовление и сборка.
4 Отклик ротора на воздействие дисбаланса может изменяться с изменением частоты вращения и состояния опорных подшипников.
5 Диапазон частот вращения охватывает все частоты начиная с состояния покоя до максимальной рабочей частоты. Этот диапазон может быть взят с запасом, чтобы включить в себя более высокие частоты вращения, связанные с возможным изменением рабочих условий (температуры, давления, потока).
6 С точки зрения уравновешенности ротора достаточно рассматривать только изменения положений масс ротора, несимметричных относительно его оси вращения.
3.13 жесткий ротор: Тип ротора, при котором его дисбаланс не изменяется значительно с изменением частоты вращения, для описания неуравновешенности достаточно использовать только главный вектор и главный момент дисбалансов и положение всех масс сохраняется практически неизменным друг относительно друга во всем диапазоне частот вращения.
Примечание - Дисбаланс жесткого ротора может быть устранен установкой корректирующих масс в двух произвольно выбранных плоскостях коррекции.
4.1 Общие положения
Балансировка представляет собой процедуру, при которой оценивают распределение масс ротора и, при необходимости, изменяют его таким образом, чтобы остаточный дисбаланс или вибрация ротора или силы, действующие в подшипнике на частоте вращения ротора, находились в установленных пределах.
Дисбаланс ротора может быть обусловлен конструктивными особенностями, применяемым материалом, погрешностями изготовления или сборки. Каждый ротор, даже выпускаемый серийно, имеет собственное индивидуальное распределение дисбаланса вдоль своей длины.
4.2 Различные способы представления дисбаланса
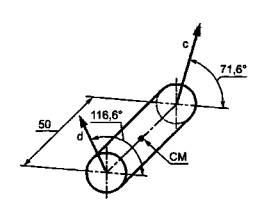
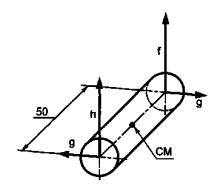
Один и тот же дисбаланс жесткого ротора может быть представлен различными способами, как показано на рисунках 1 а) - 1 f).
На рисунках 1 а) - 1 с) различные представления одного и того же дисбаланса показаны через главный вектор дисбалансов и пару кососимметричных дисбалансов, определяющих моментную неуравновешенность ротора, а на рисунках 1 d) - 1 f) - в виде динамических дисбалансов в двух плоскостях ротора.
Примечания
1 Главный вектор дисбалансов может быть отнесен (без изменения его модуля и фазового угла) к любой радиальной плоскости ротора, однако от положения главного вектора дисбалансов будет зависеть главный момент дисбалансов.
2 Под центром дисбаланса понимают точку на оси ротора, куда относят главный вектор дисбалансов, так чтобы главный момент дисбалансов достигал своего минимума.
Размеры в миллиметрах
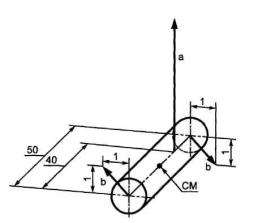
а) Главный вектор дисбалансов с парой кососимметричных дисбалансов в торцовых плоскостях ротора
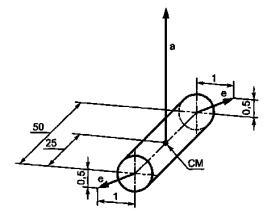
b) Частный случай а): главный вектор дисбалансов, приложенный к центру масс (статический дисбаланс) с парой кососимметричных дисбалансов в торцовых плоскостях ротора
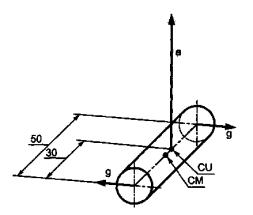
с) Частный случай а): главный вектор дисбалансов, приложенный к центру дисбаланса ротора, с минимальными (по модулю) кососимметричными дисбалансами в плоскости, перпендикулярной к направлению главного вектора дисбалансов
d) Векторы дисбалансов в торцовых плоскостях ротора
СМ - центр масс; CU - центр дисбаланса
|
а Модуль дисбаланса равен 5 г·мм |
е Модуль дисбаланса равен 1,12 г·мм |
|
b Модуль дисбаланса равен 1,41 г·мм |
f Модуль дисбаланса равен 3 г·мм |
|
с Модуль дисбаланса равен 3,16 г·мм |
g Модуль дисбаланса равен 1 г·мм |
|
d Модуль дисбаланса равен 2,24 г·мм |
h Модуль дисбаланса равен 2 г·мм |
Рисунок 1 - Различные представления одного и того же дисбаланса ротора, лист 1
е) Разложение дисбалансов в торцовых плоскостях ротора на ортогональные составляющие
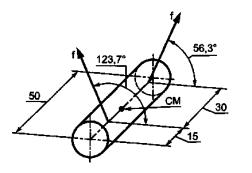
f) Векторы дисбалансов, приведенные к двум другим плоскостям ротора
СМ - центр масс; CU - центр дисбаланса
|
а Модуль дисбаланса равен 5 г·мм |
е Модуль дисбаланса равен 1,12 г·мм |
|
b Модуль дисбаланса равен 1,41 г·мм |
f Модуль дисбаланса равен 3 г·мм |
|
с Модуль дисбаланса равен 3,16 г·мм |
g Модуль дисбаланса равен 1 г·мм |
|
d Модуль дисбаланса равен 2,24 г·мм |
h Модуль дисбаланса равен 2 г·мм |
Рисунок 1, лист 2
В случаях, когда для достижения уравновешенности ротора достаточно проведения статической балансировки (см. 4.5.2) или когда дисбаланс описывают через главный вектор дисбалансов и пару кососимметричных дисбалансов (см. 4.5.4), предпочтительно использовать представления 1 а) - 1 с). В случаях же, когда дисбаланс рассматривают как сосредоточенный в двух плоскостях ротора, предпочтительно использовать представления 1 d) - 1 f).
4.3 Последствия дисбаланса
Главный вектор дисбалансов и главный момент дисбалансов (или пара кососимметричных дисбалансов) по-разному влияют на силы, действующие в подшипниках ротора, и вибрацию машины. Поэтому их часто рассматривают отдельно. Даже в случае представления дисбаланса в виде динамического дисбаланса в двух плоскостях коррекции обращают внимание на то, что в большей степени сформировало данный динамический дисбаланс, - главный вектор дисбалансов или главный момент дисбалансов.
Допустимые значения дисбаланса предпочтительно устанавливать в специальных плоскостях-плоскостях задания допуска. У любого жесткого ротора существуют две «идеальные» плоскости задания допуска, в которых достаточно установить допустимые значения дисбалансов вне зависимости от их угловых положений.
В большинстве случаев такие плоскости расположены вблизи подшипниковых опор. Кроме того, поскольку целью балансировки является, как правило, снижение вибрации и сил, передаваемых вовне на конструкцию машины через подшипники, в настоящем стандарте под плоскостями задания допуска А и В понимают плоскости соответствующих подшипниковых опор.
4.5 Плоскости коррекции
4.5.1 Общие положения
Ротор, значения дисбаланса которого выходят за пределы допустимых значений, нуждается в корректировке его масс. Часто эту операцию невозможно провести в плоскостях задания допуска, и ее приходится выполнять там, где есть возможность добавления, удаления или перемещения материала.
Число необходимых плоскостей коррекции зависит от значения и распределения начального дисбаланса, а также от конструкции ротора, которая определяет, в частности, области внесения корректирующих масс и положение плоскостей коррекции относительно плоскостей задания допуска.
4.5.2 Роторы, для балансировки которых достаточно одной плоскости коррекции
Для роторов некоторых видов выходить за пределы допустимых значений может только значение главного вектора дисбалансов, в то время как главный момент дисбалансов всегда находится в установленных пределах. Типичным примером служат роторы в форме диска при условии выполнения следующих требований:
- расстояние между подшипниками ротора достаточно велико;
- диск вращается с незначительными осевыми биениями;
- плоскость коррекции выбрана так, что при внесении в нее корректирующих масс не происходит значительного увеличения главного момента дисбалансов.
Выполнение вышеперечисленных требований следует проверять в каждом случае отдельно. Для этого рекомендуется провести статическую балансировку для значительного числа роторов, в процессе которой определить максимальный главный момент дисбалансов, после деления которого на расстояние между подшипниковыми опорами получить значения пары кососимметричных дисбалансов в плоскостях опор. Если даже в этом наихудшем случае полученные значения кососимметричных дисбалансов будут признаны допустимыми, можно принять решение о проведении для данного ротора только статической балансировки.
Хотя при статической балансировке ротор можно не приводить во вращение, тем не менее, это обычно выполняют в целях повышения точности. В процессе балансировки определяют главный вектор дисбалансов и приводят его значение к допустимому.
4.5.3 Роторы, для балансировки которых необходимы две плоскости коррекции
Если ротор жесткого типа не имеет форму диска или для него не выполнены условия, перечисленные в 4.5.2, помимо главного вектора дисбалансов в процессе балансировки следует устранять также главный момент дисбалансов. В большинстве случаев эти два вида дисбаланса представляют как пару дисбалансов, отнесенных к двум плоскостям ротора [см. рисунок 1 d)].
В случае динамической балансировки ротор необходимо приводить во вращение.
4.5.4 Ротор с тремя и более плоскостями коррекции
Хотя теоретически для любого жесткого ротора дисбаланс можно устранить балансировкой в двух плоскостях коррекции, иногда используют большее число плоскостей, например в случаях, когда:
главный вектор дисбалансов и главный момент дисбалансов устраняют по отдельности (т.е. главный вектор дисбалансов устраняют в плоскости иной, чем используемые для коррекции кососимметричных дисбалансов);
корректирующие массы вносят (удаляют) по всей длине ротора.
Примечание - В особых случаях распределение корректирующих масс по длине ротора проводят, если имеются какие-либо ограничения на их распределение в плоскостях коррекции (например, балансировка коленчатых валов путем высверливания отверстий в противовесах), или с целью сохранить прочностные свойства материала ротора.
4.6 Допустимый остаточный дисбаланс
В простейшем случае
межопорного ротора малой длины, кососимметричными дисбалансами которого допускается
пренебречь, состояние неуравновешенности может быть описано через одну
векторную величину-дисбаланс ![]() .
.
Для удовлетворительной работы ротора значение этого дисбаланса (остаточного дисбаланса Ures) не должно превышать некоторого допустимого значения Uper:
Ures ≤ Uper. (1)
Обобщая, то же самое можно отнести к ротору любого типа.
Примечание - В международной системе единиц СИ (далее - система единиц СИ) величину Uper измеряют в килограмм-метрах (кг·м), однако в целях балансировки более практично использовать единицу измерений грамм-миллиметр (г·мм).
Uper определяют как общее допустимое значение в плоскости центра масс ротора. В случае динамической балансировки это допустимое значение следует разнести по двум плоскостям задания допуска (см. раздел 7).
5.1 Общие положения
Принцип подобия позволяет оценить и рассчитать влияние массы ротора и его рабочей частоты вращения на значение допустимого остаточного дисбаланса.
5.2 Допустимый остаточный дисбаланс и масса ротора
В общем случае для ротора любого типа допустимый остаточный дисбаланс Uper пропорционален массе ротора т:
Uper ~ m. (2)
Отношение допустимого остаточного дисбаланса к массе ротора представляет собой допустимый остаточный удельный дисбаланс ереr:
ереr = Uper / т. (3)
Примечания
1 В системе единиц СИ величину Uper / т измеряют в килограмм-метрах на килограмм (кг·м/кг), однако в практических целях часто используют единицу измерений грамм-миллиметр на килограмм (г·мм/кг) или микрометр (мкм).
2 В системе единиц СИ величину ереr измеряют в килограмм-метрах на килограмм (кг- м/кг) или метрах (м). Однако более практичной единицей является микрометр (мкм), поскольку в большинстве случаев допустимый остаточный удельный дисбаланс находится в пределах от 0,1 до 10 мкм. Величину ереr применяют обычно, если хотят сопоставить допустимый дисбаланс с геометрическими допусками (биения ротора, зазор вала).
3 Если для ротора (например, диска, насаженного перпендикулярно к оси вала) существенным является только главный вектор дисбалансов, то ереr представляет собой расстояние от центра масс ротора до оси вала. Для ротора общего вида ереr не имеет ясного физического смысла и отражает влияние как главного вектора дисбалансов, так и главного момента дисбалансов.
4 Существуют ограничения на достижимые значения остаточного удельного дисбаланса ереr, связанные с условиями проведения балансировки, например центровкой вала, характеристиками подшипников и привода.
5 На практике малые значения ереr удается получить только при высокой точности изготовления цапф вала (крутости, прямолинейности). В некоторых случаях необходимо уравновешивать ротор в своих собственных подшипниках с использованием ременного, воздушного приводов или передачи, применяемой на месте установки. Другим способом является балансировка ротора в сборе в своем корпусе с собственными подшипниками и приводом в нормальных условиях эксплуатации при нормальном температурном режиме.
5.3 Допустимый удельный дисбаланс и рабочая частота вращения
Опыт показывает, что, как правило, для роторов одного вида допустимый остаточный удельный дисбаланс ереr изменяется обратно пропорционально рабочей частоте вращения ротора n:
ереr ~ 1 / n. (4)
Та же зависимость, выраженная через угловую скорость вращения ротора Ω на максимальной рабочей частоте вращения, принимает вид
ереr Ω = const. (5)
Это соотношение следует также из общего соображения, что для геометрически подобных роторов с равными тангенциальными скоростями движения их поверхности возникающие в роторах напряжения и удельные нагрузки на подшипник (вследствие центробежных сил) будут одинаковы. На этом соотношении основаны классы точности балансировки (см. 6.2, таблицу 1 и рисунок 2).
Примечание - Если максимальная проектная частота вращения ротора существенно превышает его рабочую частоту вращения (например, ротор двигателя переменного тока, изначально рассчитанный на частоту вращения 3000 мин-1, используют в сборе со статором, допускающим вращение с частотой 1000 мин-1), то применение принципа подобия может привести к чрезмерно большим ограничениям на ереr. В этом случае могут быть допустимы более высокие значения ереr (для приведенного примера это значение может быть увеличено в отношении 3000/1000).
6.1 Общие положения
Значения допустимого дисбаланса могут быть установлены пятью различными способами (см. 6.2-6.5). Эти способы основаны:
- на классах точности балансировки, установленных по многолетнему опыту работы с роторами различных видов (см. 6.2);
- на экспериментальных оценках (см. 6.3);
- на требовании ограничения сил, действующих на подшипники вследствие дисбаланса (см. 6.4.1);
- на требовании ограничения вибрации, вызываемой дисбалансом (см. 6.4.2);
- на собственном опыте организации.
Выбор конкретного способа является предметом соглашения между изготовителем и заказчиком.
6.2 Классы точности балансировки G
6.2.1 Классификация
На основе мирового опыта с учетом правила подобия (см. раздел 5) были установлены классы точности балансировки G, которые определяют требования к качеству балансировки для машин типичных видов (см. таблицу 1).
Классы точности балансировки G построены на основе значения произведения ереr Ω, выраженного в миллиметрах в секунду (мм/с). Если, например, это значение составляет 6,3 мм/с, класс точности балансировки обозначают G 6,3.
Границы классов точности балансировки образуют геометрическую прогрессию со знаменателем 2,5. В некоторых случаях допускается более детальная классификация, особенно когда требуется проведение балансировки высокой точности, но в любом случае знаменатель геометрической прогрессии, используемый для такой классификации, не должен быть менее чем 1,6.
На рисунке 2 изображен график зависимости ереr от максимальной рабочей частоты вращения ротора.
Примечание - На основе анализа экспериментальных данных на рисунке 2 выделена область параметров, наиболее часто используемая на практике.
6.2.2 Машины специальной конструкции
Построенные классы точности основаны на результатах измерений, полученных для машин типичных конструкций, у которых масса ротора составляет определенную долю общей массы машины. Для машин специальной конструкции определение класса точности может быть иным.
Пример - Электродвигатели с высотой оси вала менее 80 мм относят к классу G 6,3, на основе чего рассчитывают соответствующий допустимый дисбаланс (см. 6.2.3). Полученные значения допустимых дисбалансов применимы в случаях, когда масса ротора составляет некоторую типичную долю массы машины, например 30 %. Для легких роторов эта доля может падать до 10%. Как следствие, значение допустимого дисбаланса может быть увеличено в три раза. И наоборот, доля массы ротора в общей массе машины может быть чрезмерно высока - до 90% (например, у двигателей с вынесенным ротором). В этом случае может потребоваться уменьшение допустимого остаточного дисбаланса в три раза.
6.2.3 Допустимый остаточный дисбаланс
На основе выбранного класса точности балансировки G допустимый остаточный дисбаланс Uper, г·мм, может быть получен по формуле
где (eper Ω) - показатель класса точности балансировки, мм/с;
т - масса ротора, кг;
Ω - угловая скорость вращения ротора, рад/с (это значение может быть получено из рабочей частоты вращения ротора п, мин-1, по формуле Ω ≈ n / 10).
Другим способом определения допустимого остаточного дисбаланса является использование рисунка 2 для нахождения значения ереr после чего Uper, г·мм, находят по формуле
Uper = ереr m. (7)
Примечание - Следует обратить внимание на то, что допустимый остаточный дисбаланс Uper, показатель класса точности балансировки (eper Ω) и допустимый остаточный удельный дисбаланс eper входят в формулы с соответствующими единицами измерений. Пример расчета допустимого дисбаланса приведен в приложении А.
Таблица 1 - Рекомендуемые классы точности балансировки для жестких роторов
|
Виды машин (роторов) |
Класс точности балансировки |
Значение eper Ω мм/с |
|
|
Приводные коленчатые валы (конструктивно не уравновешенные) для крупных низкоскоростных судовых дизельных двигателей (скорость движения поршня менее 9 м/с) |
G 4000 |
4000 |
|
|
Приводные коленчатые валы (конструктивно уравновешенные) для крупных низкоскоростных судовых дизельных двигателей (скорость движения поршня менее 9 м/с) |
G 1600 |
1600 |
|
|
Приводные коленчатые валы (конструктивно не уравновешенные) на виброизоляторах |
G 630 |
630 |
|
|
Приводные коленчатые валы (конструктивно не уравновешенные) на жестких опорах |
G 250 |
250 |
|
|
Двигатели возвратно-поступательного действия в сборе для легковых автомобилей, грузовиков и локомотивов |
G 100 |
100 |
|
|
Детали автомобилей: колеса, колесные диски, колесные пары, трансмиссии Приводные коленчатые валы (конструктивно уравновешенные) на виброизоляторах |
G 40 |
40 |
|
|
Сельскохозяйственные машины |
G 16 |
16 |
|
|
Приводные коленчатые валы (уравновешенные) на жестких опорах |
|||
|
Дробилки |
|||
|
Приводные валы (карданные валы, винтовые валы) |
|||
|
Авиационные газовые турбины |
G 6,3 |
6,3 |
|
|
Центрифуги (сепараторы, отстойники) |
|||
|
Электрические двигатели и генераторы (с высотой оси вала не менее 80 мм) с максимальной номинальной частотой вращения до 950 мин-1 |
|||
|
Электрические двигатели с высотой оси вала менее 80 мм |
|||
|
Вентиляторы |
|||
|
Зубчатые передачи |
|||
|
Машины общего назначения |
|||
|
Металлорежущие станки |
|||
|
Бумагоделательные машины |
|||
|
Насосы |
|||
|
Турбонагнетатели |
|||
|
Водяные турбины |
|||
|
Компрессоры |
G 2,5 |
2,5 |
|
|
Приводы с управлением от компьютера |
|||
|
Электрические двигатели и генераторы (с высотой оси вала не менее 80 мм) с максимальной номинальной частотой вращения свыше 950 мин-1 |
|||
|
Газовые и паровые турбины |
|||
|
Приводы металлорежущих станков |
|||
|
Текстильные станки |
|||
|
Приводы аудио- и видеоаппаратуры |
G 1 |
1 |
|
|
Приводы шлифовальных станков (машин) |
|||
|
Шпиндели и приводы высокоточного оборудования |
G 0,4 |
0,4 |
|
|
Гироскопы |
|||
|
Примечания 1 Данные относятся к роторам в сборе. Рекомендации для частей роторов даны в разделе 9. 2 Если иное специально не оговорено или не самоочевидно (как, например, в случае приводных коленчатых валов), предполагают, что данные приведены для машин и оборудования вращательного действия. 3 В отношении ограничений, связанных с условиями установки (балансировочные станки, инструменты), см. примечания 4 и 5 к 5.2. 4 Некоторая дополнительная информация в отношении выбора класса точности приведена на рисунке 2, на котором указаны типичные области применения (в параметрах рабочей частоты вращения и класса точности G), основанные на накопленном опыте. 5 В состав приводных коленчатых валов могут входить коленчатый вал, маховик, муфта сцепления, виброизоляторы, вращающиеся элементы шатунов. «Конструктивно не уравновешенные коленчатые валы» означает, что такие валы теоретически не могут быть уравновешены, «конструктивно уравновешенные коленчатые валы» означает, что такие валы теоретически могут быть уравновешены. 6 Для машин некоторых видов допустимые дисбалансы могут быть установлены соответствующими стандартами (см., например, [1], [2]). |
|||
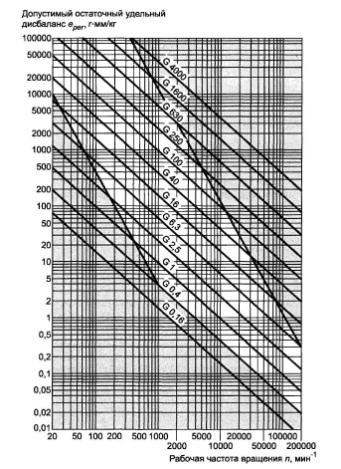
Примечание - Белым цветом выделена область параметров, наиболее часто используемых на практике.
Рисунок 2 - Допустимый остаточный удельный дисбаланс для разных классов точности G и рабочих частот вращения п (см. 6.2)
Uper определяют как значение допустимого дисбаланса в плоскости центра масс ротора. В случае динамической балансировки это значение следует представить в виде значений допустимых дисбалансов в двух заданных плоскостях (см. раздел 7).
6.3 Экспериментальное определение допустимого дисбаланса
Для продукции массового производства часто требования к качеству балансировки можно установить на основе экспериментальных данных. Испытания проводят обычно на месте эксплуатации изделия. Последовательно устанавливая различные дисбалансы в каждой плоскости коррекции, определяют допустимые остаточные дисбалансы на основе наиболее представительного критерия (например, уровня вибрации, силы или шума, связанных с дисбалансом).
Если при проведении динамической балансировки плоскости, в которых определены допустимые значения, не заданы, следует сравнить влияние пар дисбалансов, фазовые углы которых сначала совпадают, а затем различаются на 180°.
6.4.1 Ограничение сил, действующих на подшипники
В ряде случаев основной целью балансировки может быть ограничение воздействия на подшипники сил, обусловленных дисбалансом. Это ограничение сначала может быть представлено в виде предельных значений силы, но затем его необходимо преобразовать в соответствующие значения дисбаланса. В случае достаточно жестких (неподвижных) подшипников данное преобразование может быть осуществлено с помощью уравнения для центробежной силы (см. приложение В).
В остальных случаях следует учитывать динамическое поведение опорной конструкции в заданных условиях. Простых универсальных правил пересчета силы в дисбаланс не существует.
Целью балансировки может быть ограничение вибрации в заданных плоскостях ротора. Это может представлять интерес, например, для ручных машин. На основе установленных пределов для уровней вибрации могут быть заданы требования к качеству балансировки (см. приложение С).
6.5 Использование опыта эксплуатации
Организации, имеющие документально зафиксированные результаты оценки качества балансировки собственной продукции, могут использовать его для установления допустимого дисбаланса. Некоторые рекомендации даны в приложении D.
7.1 Одна плоскость
8 случае статической балансировки Uper полностью относят к одной плоскости (см. 4.5.2). Во всех остальных случаях Uper необходимо распределить между двумя плоскостями задания допуска.
7.2.1 Общие положения
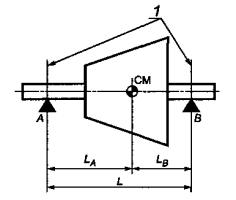
Доля Uper, отнесенная к одной из плоскостей задания допуска, пропорциональна расстоянию от центра масс до другой плоскости (см. рисунки 3 и 4). Если такими плоскостями являются плоскости подшипниковых опор А и В, справедливы следующие формулы:
![]() (8)
(8)
![]() (9)
(9)
где UperA - допустимый остаточный дисбаланс в плоскости подшипника А;
Uperв -допустимый остаточный дисбаланс в плоскости подшипника В;
Uper - (общий) допустимый остаточный дисбаланс (отнесенный к центру масс ротора);
LA - расстояние от центра масс до плоскости подшипника А;
LB - расстояние от центра масс до плоскости подшипника В;
L - расстояние между подшипниковыми опорами.
7.2.2 Ограничения для межопорного ротора
Общий вид ротора и обозначения указаны на рисунке 3. Если центр масс расположен близко к одному из подшипников, расчетное допустимое значение в плоскости этого подшипника может стать очень большим, близким к Uper, в то время как в плоскости другого подшипника это значение будет близким к нулю. Чтобы избежать чрезмерно больших и чрезмерно малых допустимых значений дисбаланса в плоскостях ротора, принимают, что:
- наибольшее допустимое значение не должно превышать 0,7 Uper;
- наименьшее допустимое значение не должно быть менее 0,3 Uper.
7.2.3 Ограничения для консольного ротора
Общий вид ротора и обозначения указаны на рисунке 4.
Допустимые значения рассчитывают по формулам (8) и (9), однако чтобы избежать чрезмерно больших и чрезмерно малых значений допустимого дисбаланса, принимают, что:
- наибольшее допустимое значение не должно превышать 1,3 Uper;
- наименьшее допустимое значение не должно быть менее 0,3 Uper.
1 - плоскости задания допуска (плоскости подшипников); СМ - центр масс
Рисунок 3 - Межопорный ротор с асимметричным расположением центра масс
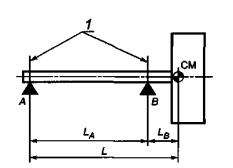
1 - плоскости задания допуска (плоскости подшипников); СМ - центр масс
Рисунок 4 - Консольный ротор с центром масс в консольной части ротора
Максимальное значение допустимого дисбаланса консольного ротора превышает установленное для межопорного ротора. Поскольку подшипник В и опорная конструкция выбраны таким образом, чтобы выдерживать повышенную статическую нагрузку консольной части ротора, естественно предположить, что они способны выдержать также и добавочную нагрузку, обусловленную дисбалансом. В противном случае предельные допустимые значения для консольного ротора должны быть теми же, что и для межопорного.
8.1 Общие положения
Настоятельно рекомендуется устранять дисбаланс непосредственно в плоскостях задания допуска, однако на практике часто для этого приходится использовать другие плоскости - плоскости коррекции.
Поскольку критерием выбора плоскостей коррекции является, в первую очередь, удобство внесения (удаления) корректирующих масс, обычно такие плоскости не являются «идеальными» с точки зрения задания в них допустимых значений дисбаланса (см. 4.4). При необходимости распределить допустимые значения по плоскостям коррекции принимают во внимание то, что, хотя степень уравновешенности ротора зависит не только от значений, но и от углов дисбалансов в плоскостях коррекции, ограничения устанавливают обычно только на абсолютные значения. Поэтому любое правило распределения допустимых значений по плоскостям коррекции будет представлять собой компромисс: необходимо рассматривать наихудший случай соотношения углов остаточных дисбалансов в плоскостях коррекции, тогда для всех других соотношений дисбалансы с теми же самыми абсолютными значениями будут оказывать меньшее воздействие на ротор.
Как следствие, в результате балансировки внесением корректирующих масс в плоскости коррекции многие роторы будут уравновешены более необходимого.
Значения допустимого остаточного дисбаланса могут быть определены одним из способов, описанных в разделе 6. При экспериментальном определении таких значений (см. 6.3), которое обычно выполняют непосредственно для плоскостей коррекции, последующего перераспределения допустимых значений дисбаланса не требуется. Если же допустимые значения задают в специальных плоскостях задания допуска, например на основе классов точности (см. 6.2), специальных ограничений (см. 6.4) или собственного опыта (см. 6.5),то может потребоваться последующее перераспределение допустимых значений по плоскостям коррекции.
8.2 Статическая балансировка
Если для балансировки ротора необходима только одна плоскость коррекции, допустимый остаточный дисбаланс в этой плоскости Uper будет равен сумме допустимых значений в плоскостях задания допуска.
Примечание - В данном случае, если для определения Uper используют классы точности балансировки (см. 6.2), процедуру распределения допустимого остаточного дисбаланса по двум плоскостям задания допуска (см. раздел 7) исключают.
8.3 Динамическая балансировка
Если плоскости коррекции расположены близко к плоскостям задания допусков, то для пересчета допустимых значений используют коэффициент 1, т.е. допустимое значение в плоскости коррекции будет тем же, что и в ближайшей плоскости задания допуска. Для других случаев способ пересчета рассмотрен в приложении Е.
9.1 Общие положения
Сборные роторы можно уравновешивать как единое целое или покомпонентно. Для каждой сборки дисбалансы ее частей будут суммироваться и, кроме того, погрешности самой сборки, связанные с появлением биений или зазоров, внесут дополнительный дисбаланс (см. ИСО 1940-2).
Примечание - Если погрешности сборки не оказывают значительного влияния, выбор способа балансировки определяется возможностями используемого балансировочного станка.
9.2 Балансировка ротора как единого целого
Лучший способ учесть дисбалансы всех частей ротора и все погрешности сборки - это провести балансировку ротора как единого целого.
Если ротор уравновешивают в сборе, но после этого требуется его разборка - например для установки в корпус машины, - рекомендуется пометить угловое положение каждой разбираемой части, чтобы обеспечить точное повторение взаимного расположения частей при окончательной сборке.
Примечание - Следует иметь в виду, что данная мера не позволяет устранить погрешности сборки полностью.
9.3 Покомпонентная балансировка
Если балансировку частей ротора необходимо проводить по отдельности, принимают во внимание следующее:
- обычно все части уравновешивают до одного и того же значения удельного дисбаланса (см. раздел 5), но возможность внесения дополнительной погрешности сборки (см. ИСО 1940-2) означает, что остаточный удельный дисбаланс для каждой части должен быть меньше определенного для всей сборки в целом;
- при возникновении проблем, например в случае легкой крыльчатки или шкива на тяжелом якоре, возможно применение любых правил перераспределения масс при условии, что общий дисбаланс сборки будет поддерживаться в установленных пределах;
- должно быть достигнуто предварительное соглашение о способе соединения отдельных частей ротора, например посредством шпонки (см. ИСО 8821).
Если покомпонентная балансировка не позволяет обеспечить уравновешенность ротора в пределах установленного допустимого значения, его уравновешивают как единое целое. При этом рекомендуется повторно рассмотреть вопрос о том, следует ли сохранять процедуру предварительной покомпонентной балансировки или ее можно исключить.
10.1 Общие положения
Проверку полученных значений остаточного дисбаланса желательно проводить в плоскостях задания допуска (см. 4.4), а не в плоскостях коррекции.
При вынесении решений следует учитывать погрешности измерений по ИСО 1940-2.
10.2 Критерии приемки
10.2.1 Общие положения
Критерии приемки установлены в предположении, что систематические погрешности измерений исключены, а неустраненная совокупная погрешность (см. ИСО 1940-2) равна ΔU. Для плоскостей подшипников А и в заданы следующие величины:
UperA - модуль допустимого остаточного дисбаланса в плоскости А;
UperB - модуль допустимого остаточного дисбаланса в плоскости В;
UrmA - результат однократного измерения модуля остаточного дисбаланса в плоскости А;
UrmB - результат однократного измерения модуля остаточного дисбаланса в плоскости В;
ΔUА - модуль совокупной погрешности в плоскости А;
ΔUB - модуль совокупной погрешности в плоскости В.
10.2.2 Критерий изготовителя
После процедуры балансировки ротор может быть признан годным при одновременном выполнении следующих соотношений:
UrmA ≤ UperA - ΔUА,
UrmB ≤ UperB - ΔUB.
10.2.3 Критерий заказчика
Если заказчик проводит дополнительный контроль результатов балансировки, то ротор признают годным при одновременном выполнении следующих соотношений:
UrmA ≤ UperA + ΔUА,
UrmB ≤ UperB + ΔUB.
10.2.4 Дополнительные замечания
Если значения погрешностей ΔUА (ΔUB) составляют менее 5 % UperA (UperB), ими можно пренебречь.
Значения ΔUА и ΔUB обычно различны для разных балансировочных станков. Поэтому изготовитель и заказчик могут использовать разные значения этих погрешностей.
Погрешность измерений можно уменьшить, повторив их несколько раз на разном балансировочном оборудовании с привлечением нескольких специалистов.
10.3 Подтверждение качества балансировки на балансировочных станках
Сначала в соответствии с ИСO 1940-2 определяют и устраняют систематическую погрешность измерений.
При проверке качества балансировки на балансировочных станках возможно непосредственное измерение остаточных дисбалансов. Обе характеристики - коэффициент уменьшения дисбаланса и минимально достижимый остаточный дисбаланс -должны удовлетворять заданным значениям (см. ИСО 2953).
Процедура, описанная в 10.4, допускает также реализацию на балансировочном станке, но только если он позволяет воспроизвести рабочую частоту вращения ротора, поскольку на низких частотах вращения сигнал вибрации может быть слишком мал.
10.4 Подтверждение качества балансировки без использования балансировочных станков
Остаточный дисбаланс может быть определен без использования балансировочного станка, например на месте эксплуатации с помощью устройств, измеряющих амплитуду и фазу вибрации на оборотной частоте.
Для этого реализуют следующую процедуру:
- проводят измерения вибрации, создаваемой ротором в его исходном состоянии;
- устанавливают корректирующую массу в одну плоскость и повторяют измерения вибрации;
- удаляют корректирующую массу, возвращая ротор в исходное состояние, помещают корректирующую массу в другую плоскость и повторяют измерения вибрации;
- оценивают полученные результаты, используя значения коэффициентов влияния, или другим методом.
Этот процесс аналогичен процедуре балансировки на месте, но без коррекции дисбаланса. При этом необходимо убедиться, что в процессе выполнения процедуры изменения вибрации вызваны исключительно внесением или удалением корректирующих масс. Поэтому измерения следует проводить в условиях повторяемости, включая поддержание постоянной частоты вращения ротора после достижения стационарного режима работы.
Если точность измерений (особенно линейность зависимости вибрации от дисбаланса) вызывает сомнения, рекомендуется повторить измерения с другими корректирующими массами, варьируя их модуль и угловое положение.
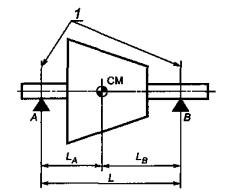
Ротор турбины имеет следующие параметры (рисунок А.1):
Масса ротора: т = 3600 кг.
Рабочая частота вращения: п = 3000 мин-1.
Геометрические параметры: LA = 1500 мм;
LB = 900 мм;
L = 2400 мм.
1 - плоскости задания допуска (плоскости подшипников); СМ - центр масс
Рисунок А.1 - Геометрические размеры ротора
Выбор класса точности: класс точности балансировки выбран из таблицы 1 для группы роторов «газовые и паровые турбины»: G 2,5.
Расчет: угловая
скорость, соответствующая рабочей частоте вращения ротора: ![]()
А.2 Определение Uper по формуле (6)
Из формулы (6) следует:
![]()
где Uper - значение допустимого остаточного дисбаланса, г·мм;
(еper Ω)- показатель класса точности балансировки, мм/с;
т - масса ротора, кг;
Ω - угловая скорость, соответствующая максимальной рабочей частоте вращения ротора, рад/с.
Примечание - При использовании данной формулы следует обратить внимание на то, что допустимый остаточный дисбаланс Uper и показатель класса точности балансировки (еper Ω) входят в нее с соответствующими единицами измерений.
А.3 Определение Uper по рисунку 2
Для заданной рабочей частоты вращения и заданного класса точности из рисунка А.2 получают:
еper ≈ 8 г·мм/кг.
Умножая еper на массу ротора, находят значение допустимого остаточного дисбаланса:
Uper ≈ 8·3600 = 28,8·103 г·мм.
А.4 Распределение допустимого остаточного дисбаланса по плоскостям задания допуска (плоскостям подшипников)
В соответствии с 7.2 допустимый остаточный дисбаланс (полученный в А.2) может быть распределен по плоскостям подшипниковых опор следующим образом:
![]()
![]()
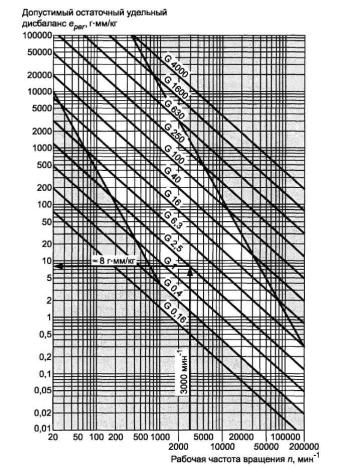
Примечание - Белым цветом выделена область параметров, наиболее часто используемых на практике.
Рисунок А.2 - Пример определения еper с помощью рисунка 2
А.5 Предельно допустимые значения
Требования по значениям допустимого дисбаланса для межопорного ротора (см. 7.2.1) принимают следующий вид:
Допустимое значение не должно превышать 0,7 Uper: Uper max ≤ 20,0·103 г·мм.
Допустимое значение не должно быть меньше 0,3 Uper: Uper min ≥ 8,6·103 г·мм.
А.6 Результат
Видно, что UperА больше, чем Uper min, a UperB меньше, чем Uper max. Поскольку оба расчетных значения удовлетворяют заданным ограничениям, их принимают в качестве окончательных.
В.1 Общие положения
Одной из задач, решаемых с помощью балансировки, может быть ограничение сил, действующих на подшипники (см. 6.4.1). Если заданы предельные значения таких сил, их необходимо преобразовать в значения дисбалансов. Только в случае жестких (неподвижных) подшипников данное преобразование может быть осуществлено с помощью уравнения для центробежной силы:
UperA = FA / Ω2;
UperB = FB / Ω2,
где UperA - допустимый остаточный дисбаланс в плоскости подшипника А;
UperB - допустимый остаточный дисбаланс в плоскости подшипника В;
FA - допустимое силовое воздействие на подшипник А, вызванное дисбалансом;
FB - допустимое силовое воздействие на подшипник В, вызванное дисбалансом;
Ω - угловая скорость, соответствующая максимальной рабочей частоте вращения.
Примечание - Предполагают, что входящие в уравнение величины измеряют согласно системе единиц СИ по ИСО 1000. Обычно при расчетах используют значения допустимого остаточного дисбаланса, выраженные в заданных единицах измерений (см. 4.6), - на это следует обращать внимание.
В.2 Пример
В.2.1 Исходные данные для расчета
Для ротора, описанного в приложении А, установлены следующие максимально допустимые силы в подшипниковых опорах, обусловленные дисбалансом:
- для подшипника A: FA = 1200 Н;
- для подшипника В: FB = 2000 Н.
В.2.2 Расчет
Допустимые остаточные дисбалансы в плоскостях подшипников:
![]()
![]()
Исследования динамического поведения ротора в составе машины и вибрационного отклика, обусловленного дисбалансом, как правило, требуют применения сложных, детализированных моделей. Такой подход требует учета большого числа параметров и не рассматривается настоящим стандартом.
В ряде случаев могут быть использованы упрощенные модели расчета, однако критерии применимости таких моделей в настоящее время не разработаны.
D.1 Общие положения
Предприятие, собравшее достаточное количество документированных данных, чтобы оценить качество балансировки своей продукции, может использовать свой опыт для установления допустимых значений, в том числе когда изменение конструкции машин требует применения в них роторов новой конструкции.
D.2 Почти идентичные роторы
Для новых роторов, незначительно отличающихся по размерам от ранее успешно проходивших процедуру балансировки, могут быть установлены те же значения допустимого дисбаланса для тех же плоскостей задания допуска.
D.3 Роторы, близкие по размерам
D.3.1 Общие положения
Для новых роторов, близких по размерам к ранее успешно проходившим процедуру балансировки, допустимые значения могут быть получены разными способами, два из которых описаны ниже.
D.3.2 Интерполяция
На графике (рисунок D.1) показана полученная опытным путем зависимость допустимых значений от размеров ротора (эта обобщенная характеристика включает в себя такие параметры, как диаметр, масса, развиваемая мощность). На основе построенной зависимости может быть получено допустимое значение дисбаланса для нового ротора в соответствии с его размером.
Примечание - Для роторов разных видов может потребоваться построение разных графиков.
Полученные предельные значения используют для аналогично расположенных плоскостей задания допусков.

![]() - данные по известным роторам;
- данные по известным роторам; ![]() - размер нового ротора
- размер нового ротора
Рисунок D.1 - Интерполяционная кривая для допустимых значений дисбаланса
D.3.3 Расчетный способ
Для ряда роторов одного вида может быть использовано правило подобия в отношении их масс и рабочих частот вращения (см. раздел 5). Допустимый остаточный дисбаланс Uper прямо пропорционален массе ротора т и обратно пропорционален частоте вращения п.
Допустимый остаточный дисбаланс для нового ротора Uper new на основе собранных данных для другого ротора Uper known можно вычислить по формуле
![]()
Если известно распределение допустимого остаточного дисбаланса по плоскостям задания допуска, эти значения для нового ротора могут быть получены по аналогичным формулам.
Полученные предельные значения используют для аналогично расположенных плоскостей задания допуска.
D.4 Роторы другого вида
После оценки разницы в функционировании, конструкции, установке нового ротора можно задать корректированные требования для допустимых значений дисбаланса, однако эта задача намного сложнее рассмотренных в настоящем приложении и требует гораздо большего опыта и знаний. Никаких общих рекомендаций в данном случае привести нельзя.
Е.1 Общие положения
Как указано в 4.4 и 8.1, допустимые остаточные дисбалансы рекомендуется задавать в специальных плоскостях задания допуска (часто совпадающих с плоскостями подшипников), а не в плоскостях коррекции. Но с учетом того, что современная практика балансировки зачастую требует знания значений допустимого дисбаланса (далее - допустимые значения) в плоскостях коррекции, в настоящем приложении приведены некоторые основные правила пересчета.
Е.2 Плоскости коррекции внутри плоскостей задания допусков
Для случая, изображенного на рисунке Е.1, способ пересчета аналогичен указанному в 8.3. В плоскостях коррекции устанавливают те же допустимые значения, что и в ближайших плоскостях задания допуска:
UperI = UperA;
UperII = UperB,
где UperI - допустимый остаточный дисбаланс в плоскости коррекции I;
UperII - допустимый остаточный дисбаланс в плоскости коррекции II;
UperA - допустимый остаточный дисбаланс в плоскости задания допуска А;
UperB - допустимый остаточный дисбаланс в плоскости задания допуска В.
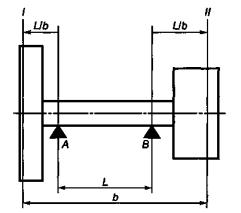
Е.3 Плоскости коррекции снаружи плоскостей задания допусков
Для случая, изображенного на рисунке Е.2, рекомендуется уменьшить допустимое значение пропорционально отношению пролета ротора между подшипниками к расстоянию между плоскостями коррекции:
![]()
![]()
где UperI - допустимый остаточный дисбаланс в плоскости коррекции I;
UperII - допустимый остаточный дисбаланс в плоскости коррекции II;
UperA - допустимый остаточный дисбаланс в плоскости задания допуска А;
UperB - допустимый остаточный дисбаланс в плоскости задания допуска В.
L - расстояние между подшипниками ротора;
b - расстояние между плоскостями коррекции ротора I и II.
А, В - плоскости задания допуска (плоскости подшипников); I, II - плоскости коррекции
Рисунок Е.1 - Пересчет для плоскостей коррекции, расположенных между плоскостями задания допуска
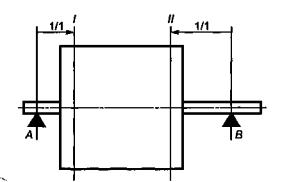
А, В - плоскости задания допуска (плоскости подшипников); I, II - плоскости коррекции
Рисунок Е.2 - Пересчет для плоскостей коррекции, расположенных снаружи
Е.4 Более сложные случаи взаимного расположения плоскостей
Для роторов с более сложным взаимным расположением плоскостей простых правил перераспределения допустимых значений на существует. В этом случае допустимые остаточные дисбалансы рекомендуется устанавливать в плоскостях подшипников (см. 4.4).
Таблица F.1
|
Обозначение и наименование международного стандарта |
Степень соответствия |
Обозначение и наименование межгосударственного стандарта |
|
ИСО 1000:1992 «Единицы измерений СИ и рекомендации по применению кратных или дольных единиц, а также некоторых других единиц измерений» |
NEQ |
ГОСТ 8.417-2002 «Государственная система обеспечения единства измерений. Единицы величин» |
|
ИСО 1925:2001 «Вибрация. Балансировка. Термины и определения» |
NEQ |
ГОСТ 19534-74 «Балансировка вращающихся тел. Термины» |
|
ИСО 1940-2:1997 «Вибрация. Требования к качеству балансировки жестких роторов. Часть 2. Погрешности определения дисбаланса» |
IDT |
ГОСТ ИСО 1940-2-99 «Вибрация. Требования к качеству балансировки жестких роторов. Часть 2. Учет погрешностей оценки остаточного дисбаланса» |
|
ИСО 2953:1999 «Вибрация. Станки балансировочные. Характеристики и методы их проверки» |
MOD |
ГОСТ 20076-2007 (ИСО 2953:1999) «Вибрация. Станки балансировочные. Характеристики и методы их проверки» |
|
ИСО 8821:1989 «Вибрация. Балансировка. Соглашение об учете влияния шпонки при балансировке валов и насаживаемых деталей» |
MOD |
ГОСТ 31322-2006 (ИСО 8821:1989) «Вибрация. Требования к балансировке элементов ротора, собираемых с помощью шпонки» |
|
ИСО 11342:1998 «Вибрация. Методы и критерии балансировки гибких роторов» |
MOD |
ГОСТ 31320-2006 (ИСО 11342:1998) «Вибрация. Методы и критерии балансировки гибких роторов» |
|
Вибрация и удар. Термины и определения |
|
|
(ISO 2041:1990) |
(Vibration and shock - Vocabulary) |
|
Вентиляторы промышленные. Требования к качеству балансировки и производимой вибрации |
|
|
(ISO 14694:2003) |
(Industrial fans - Specifications for balance quality and vibration levels) |
Ключевые слова: балансировка, ротор, жесткий ротор, дисбаланс, остаточный дисбаланс, оценка
Хотите оперативно узнавать о новых публикациях нормативных документов на портале? Подпишитесь на рассылку новостей!
Все ГОСТы >> ГОСТы «Строительная техника и оборудование, грузоперевозки >>